publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025


2024



2023


2022


2021


2019

2015
-
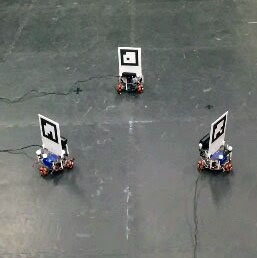 2-D cooperative localization with omni-directional mobile robotsIn 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) , 2015
2-D cooperative localization with omni-directional mobile robotsIn 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) , 2015

